
Abstract:
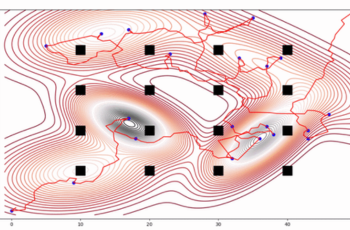
In this paper, we consider the information path-planning problem for a single robot in a stochastic environment with static obstacles subject to a preassigned constraint on the distance it can travel. Given a set of candidate sampling locations, the objective is to determine a path for the robot that allows to visit as many sampling locations as possible to accurately reconstruct an unknown underlying scalar field while not exceeding the assigned travel budget. Starting from the assumption that the phenomenon being measured can be modeled by a Gaussian Process, our algorithm balances exploration and exploitation to determine a sequence of locations ensuring that a preassigned final site is reached before the budget is consumed. Using mutual information as a reward criterion, as well as a generative model to predict consumed energy, the algorithm iteratively determines where to sample next, and when to end the mission. Our findings are validated in simulation in various scenarios and lead to a better reconstruction with less failures when compared with other methods.
Published in: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)