

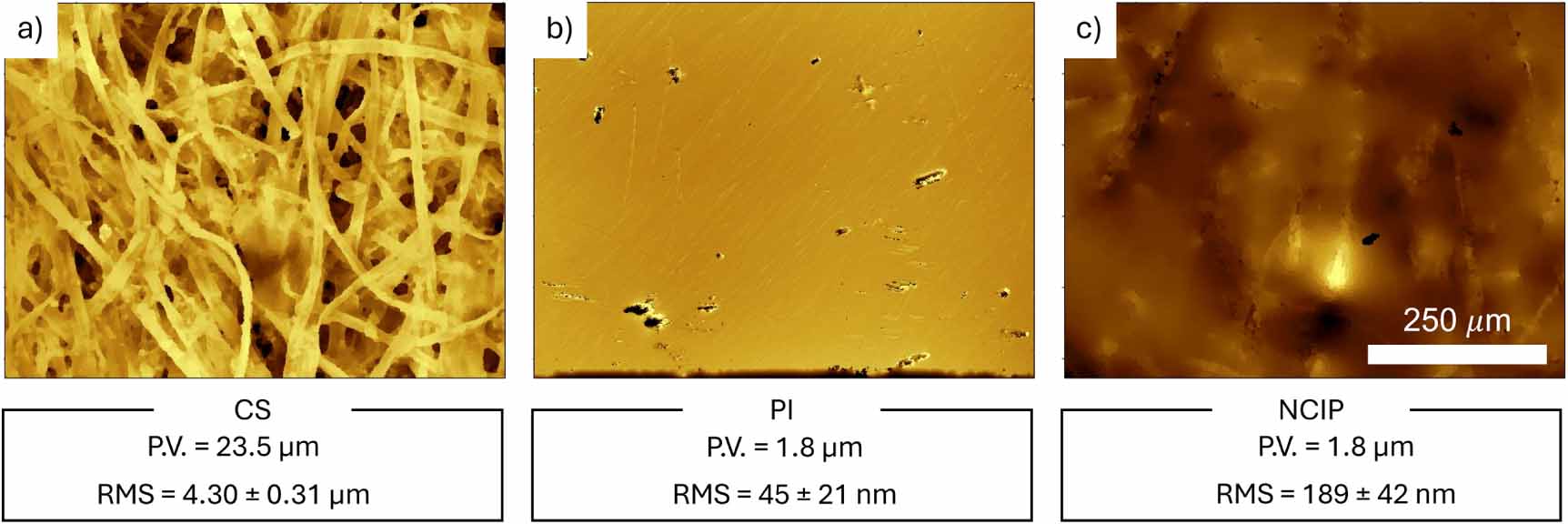
Cellulose nanofibril coated paper substrates forsustainable printed electronics and sensors
Abstract Internet of things (IoT) systems rely on the broad

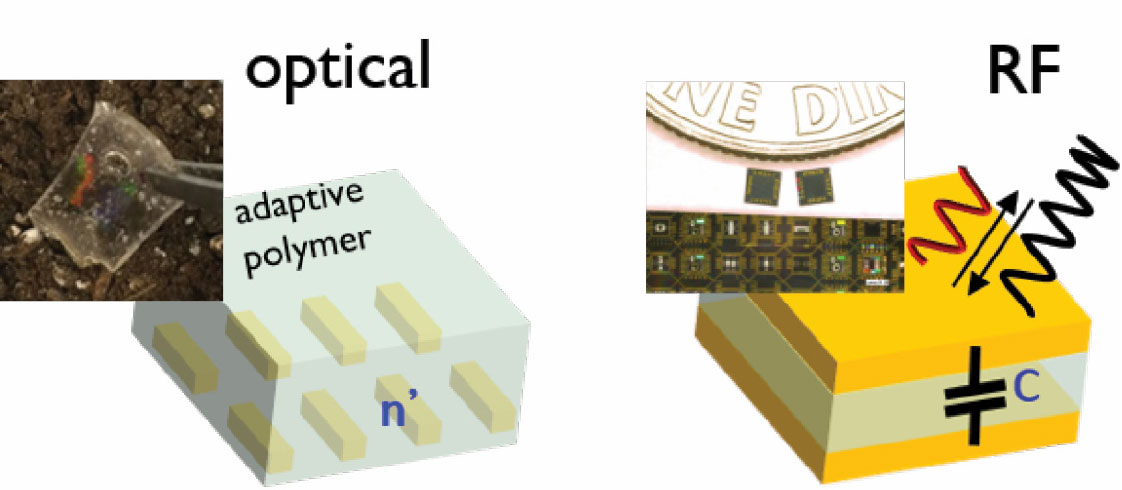
State-of-Polarization-Based Refractive Index Sensing Using Dielectric Metasurfaces
Abstract The resonance wavelength, amplitude, and state-of-polarization (SOP) of dielectric

SlideSLAM: Sparse, Lightweight, Decentralized Metric-Semantic SLAM for Multirobot Navigation
Abstract This article develops a real-time decentralized metric-semantic simultaneous localization

RT-GuIDE: Real-Time Gaussian Splatting for Information-Driven Exploration
Abstract We propose a framework for active mapping and exploration
Solving Stochastic Orienteering Problems with Chance Constraints Using a GNN Powered Monte Carlo Tree Search
Abstract Leveraging the power of a graph neural network (GNN)
An Active Perception Game for Robust Information Gathering
Abstract Active perception approaches select future viewpoints by using some