
Abstract:
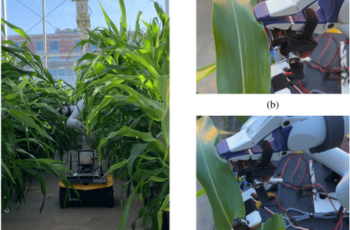
In this work, we present a novel agricultural robot called the Purdue AgBot or P-AgBot that has been designed for in-row and under canopy crop monitoring and physical sampling. We suggest approaches to autonomous navigation, crop monitoring, and crop sampling that can be applied in crop rows and under canopies for different agricultural environments. Each monitoring approach was designed to extract key morphological characteristics of the crops. The proposed approaches of P-AgBot have been experimentally verified not only in simulation but also with real corn and sorghum crops. Crop heights and stalk diameters are able to be estimated in real-time with less than 10% error. Vision-based detection of leaf samples was implemented and physical sampling is accomplished with a more than 80% success rate.
Published in: IEEE Robotics and Automation Letters ( Volume: 7, Issue: 3, July 2022)