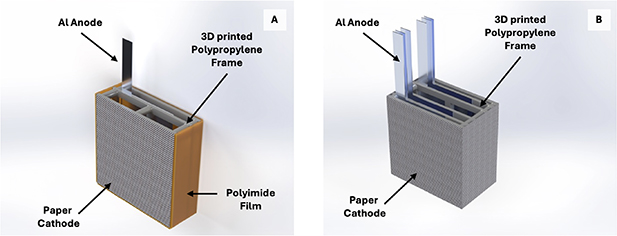
Microfabricated Silver-Based Carbon Paper Cathode for High-Power Aluminum-Air Battery in Small-Scale Quadrotor Applications
Abstract A significant challenge for power sources of small-scale quadrotors

Abstract A significant challenge for power sources of small-scale quadrotors
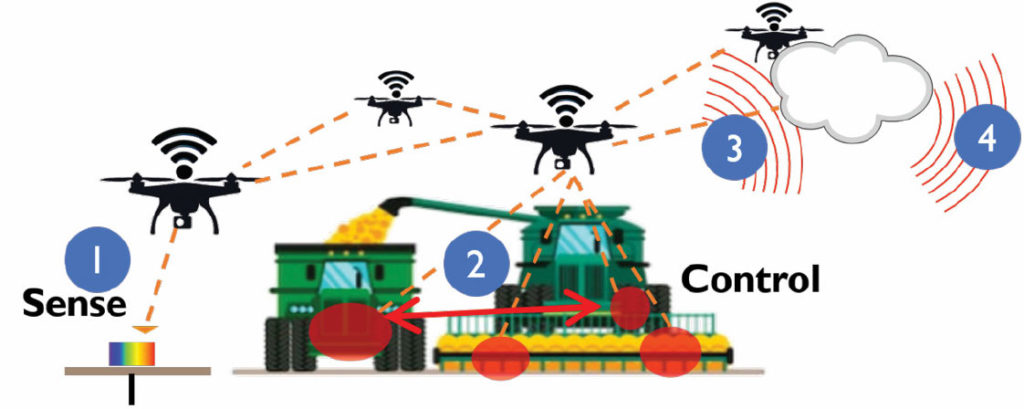
Abstract The Internet of Things (IoT) consists of multiple networked
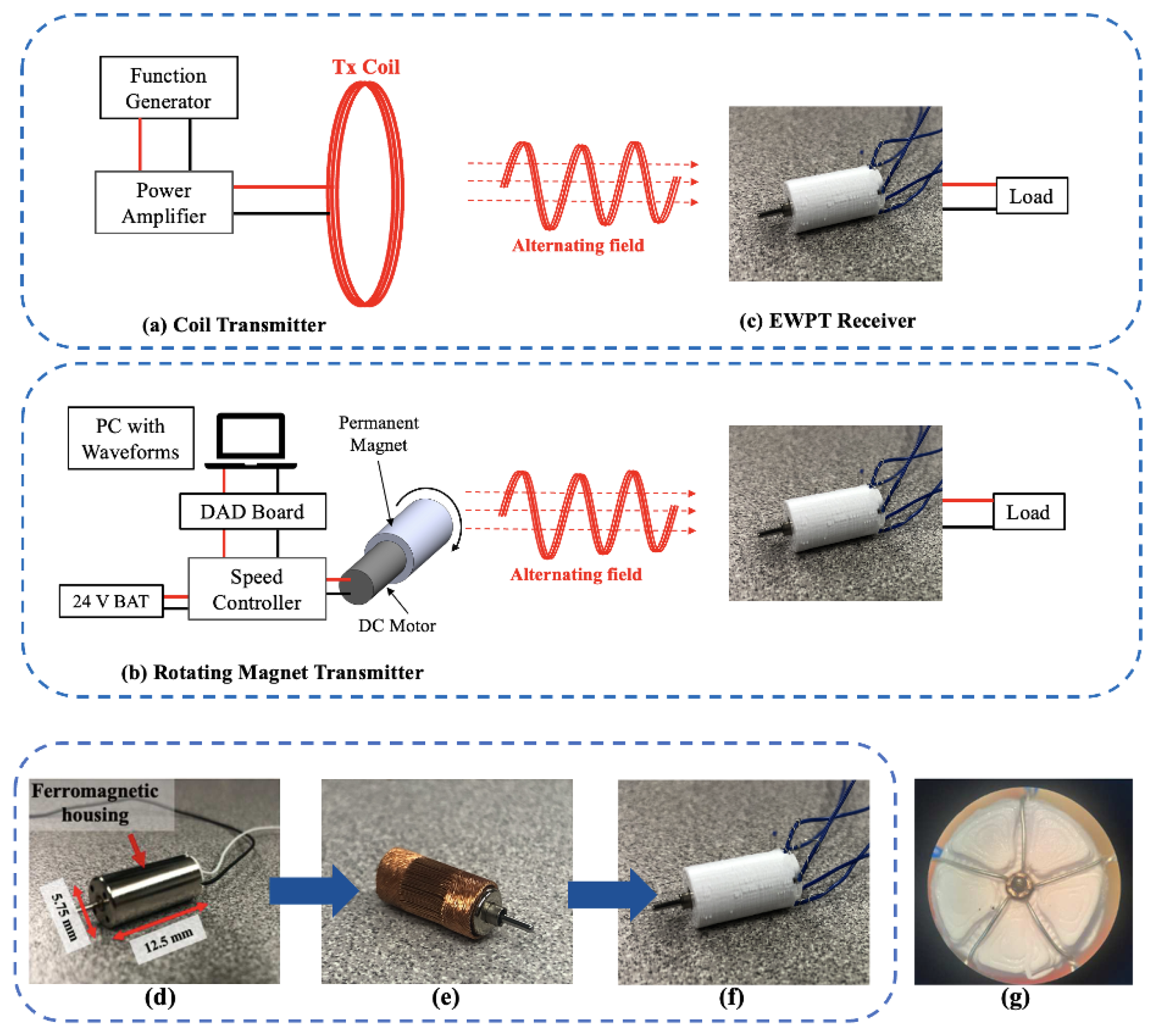
Abstract Current-carrying coils and rotating permanent magnets can be used
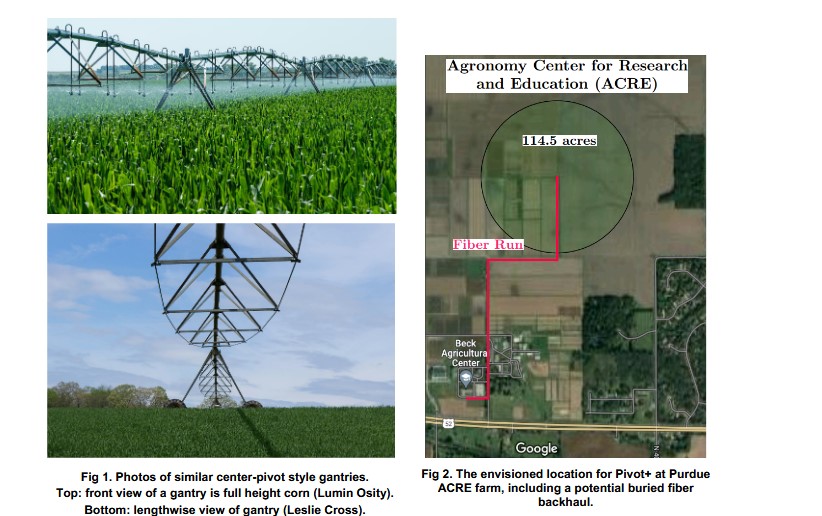
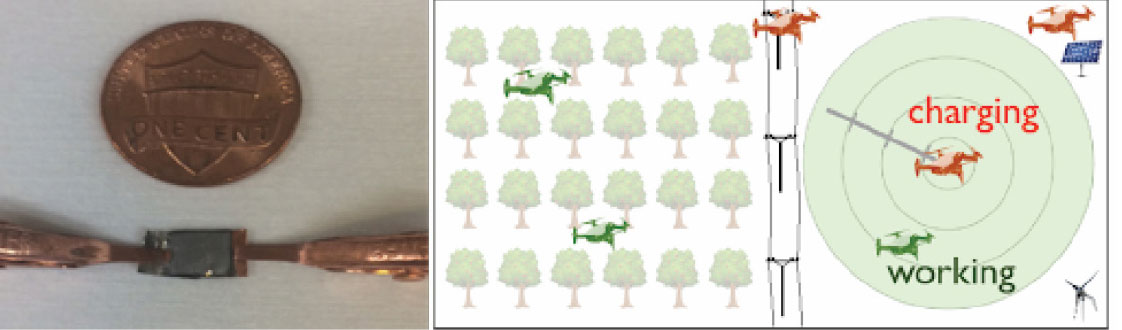
Abstract The Pivot+ Array is intended to serve as an
Abstract This paper experimentally investigates electrodynamic wireless power transmission (EWPT)
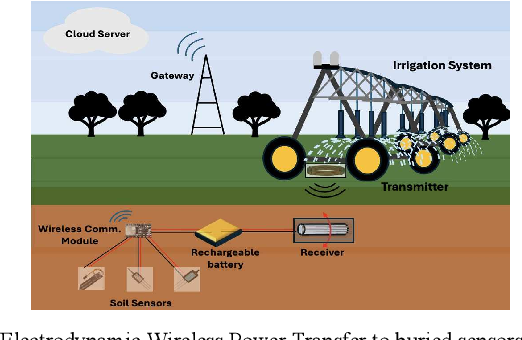
Abstract This work presents a wirelessly powered, buried soil moisture