
Abstract
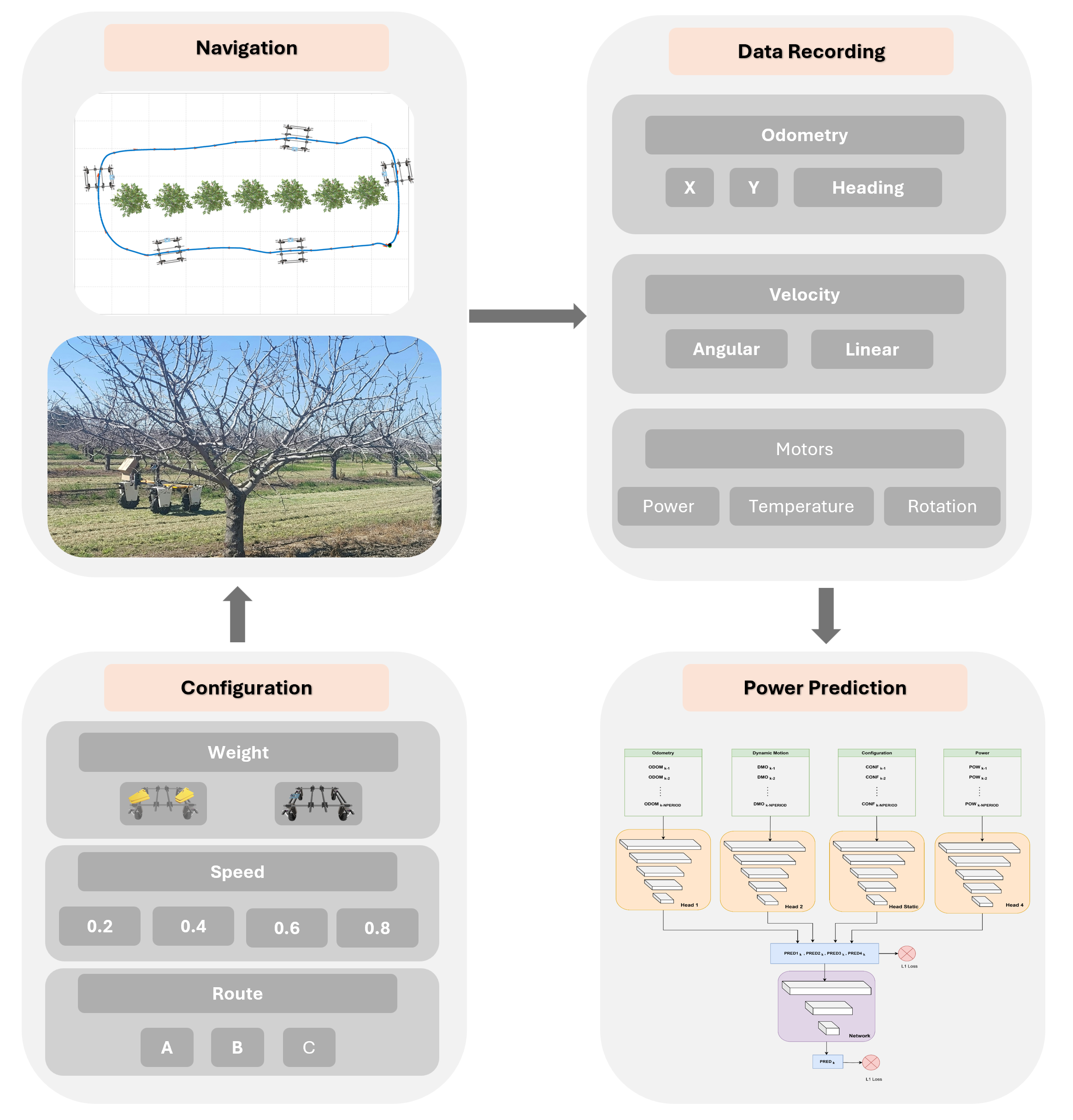
Accurate power consumption forecasting is essential for energy-aware navigation and mission planning in mobile robots operating in agricultural environments. In this study, we present a comprehensive data-driven framework for predicting power usage, based on a dataset collected from 72 real-world trials performed in an orchard. These trials cover three distinct navigation patterns: rectangular paths, capsule-shaped circuits, and unstructured trajectories reflecting real-world field operations. The proposed forecasting approach integrates recent telemetry data with static mission parameters through an extended ensemble multi-head deep learning architecture. Several models are evaluated, including linear networks, convolutional neural networks, and recurrent architectures such as gated recurrent units and long short-term memory networks. Among these, the linear model consistently demonstrated the most stable cross-route performance, whereas the convolutional neural network achieved the lowest prediction error on structured routes. The results show that short-horizon forecasts maintained prediction errors below 20 percent for structured paths, whereas long-horizon predictions based solely on prior power measurements remained within 40 percent on average. These findings demonstrate the potential of lightweight, interpretable models for practical energy forecasting in agricultural mobile robotics. This work highlights the importance of combining static and dynamic features to improve power estimation and enhance robot autonomy in off-road environments.
https://ieeexplore.ieee.org/abstract/document/11141408
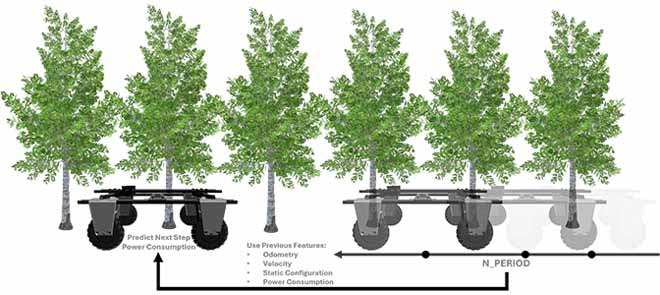
(a-b) Schematics of short-term and long-term prediction setups. (c) Actual vs predicted power for short-term. (d) Training loss showing model generalization across routes using fine-tuning.